Challenge:
The objective of the 2018-2019 FTC Rover Ruckus challenge is to create a robot that can score as many points as possible. The scoring elements are silver and gold “minerals”. In the 30-second autonomous period (preprogrammed instructions), robots can score points by landing on the playing field, placing their team marker in alliance-specific depots, and moving the gold mineral completely off of its starting location (however, if a silver mineral also moves, those points are nullified), and parking in any of the craters. After the autonomous period ends, the 2-minute driver-controlled period begins, where robots can score by placing a mineral in an alliance’s depot and placing silver or gold minerals in the designated cargo hold. The last 30 seconds of this period is the endgame, where robots can earn bonus points by parking partially or fully in a crater (parking the robot fully in the crater earns more points in comparison to parking partially), and latching onto the lander and lifting off of the playing field.
Mechanisms
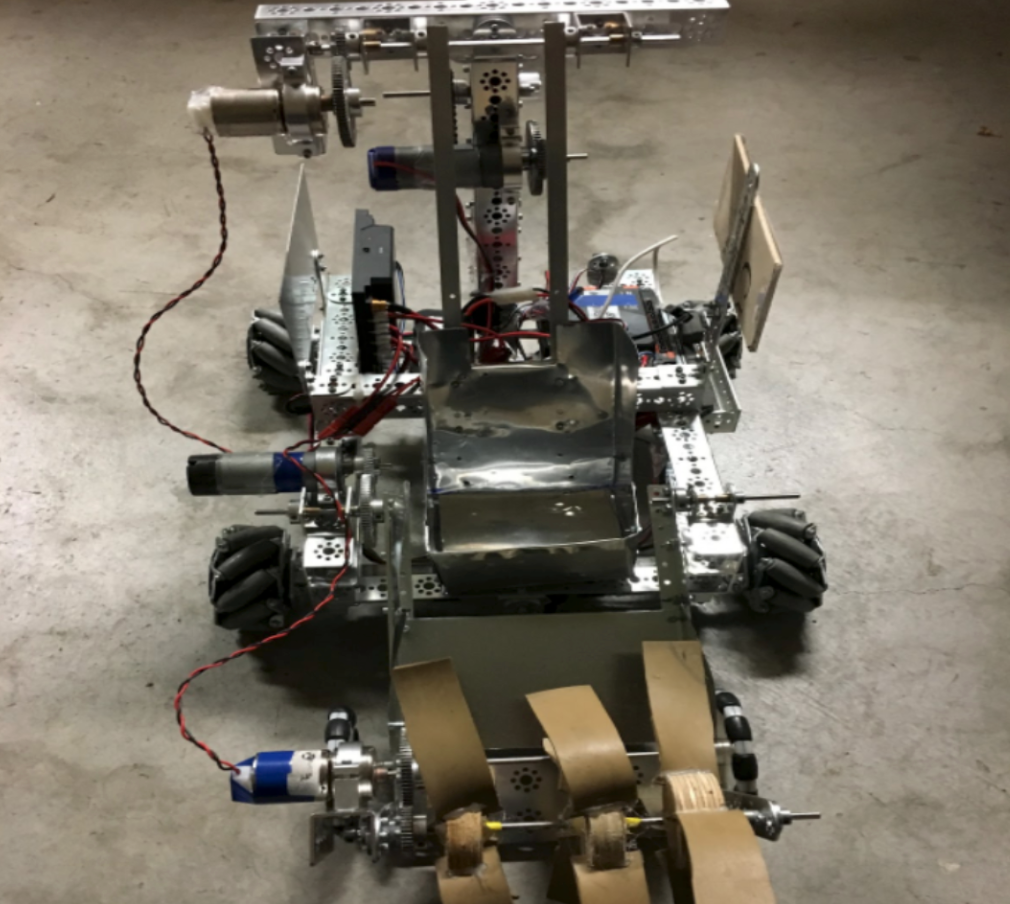
1. Our chassis is a mecanum wheel drivetrain that can move in all directions without having to turn, ensuring that our robot can quickly move across the field.
2. Our rack-and-pinion lift mechanism is used to lift the robot up and down from the lander (the highest-scoring action in the game) as well as lifting the claw to drop minerals into cargo holds.
3. We experimented with the sweep mechanism quite a bit, before settling on rotating rubber flaps to pick up the “minerals” and transport them to the depots.
4. We attached a simple bucket/scoop to the lift mechanism, whose purpose was to drop minerals into the cargo holds.